有些人認為農事作業是一種低下的工作,但沒有農業那來吃與穿?那來住與休閒娛樂?因為人要吃,才有農業。今日之農業雖可以用許多機械取代,可以在最少的勞力下從事農事所需之繁勞工作,農業之本質仍然必須依賴自然的陽光與水分,仍然必須有適當的耕耘與栽培技術。
為完成各種農事作業,必須選擇適當農具做所需的工作,並且將農具與動力源相連接,使其能受到控制,並在所用的動力不超過有效容量的範圍下完成栽培的工作。一般農事作業可分類如下:
- l. 初次犁耕。將未經攪動的土壤,在特定深度內進行犁耕作業,翻轉土壤並掩埋雜物及雜草,以控制其滋長。此外,亦包括為防止土壤沖蝕的土木工程及整地工作。
- 2. 二次犁耕。將經過初步次犁耕之土壤,進行整理,使其坵塊符合所需之大小及分佈,土壤因而獲得適度的壓實,且具良好的透氣性及透水性,以利種子或作物的生長。
- 3. 播種及移植:將種子或秧苗以正確的深度及間隔植入土中。
- 4. 作物保育與管理作業﹕包括噴藥、除草、施肥等項。
- 5. 收穫:採集所需的作物部分以供進一步使用。
- 6. 加工:將收穫後之穀物或農產品原料進行加工,使其易儲存或使用,並轉換成可供銷售的形式。
- 7. 運輸:運用不同的階段流程將物資運送到所需的地方。例如:將生產所需之物資(種子、肥料及殺蟲劑等)及機械運至田間﹕或將作物運回曬場或倉庫;或將產品運至市場。
無論小農與大農制,農業就是一個與天地為伍的產業。農作物在生長過程中,就像初生嬰兒一樣,依成長階段之不同,其所需之作業亦不相同,有些直接與作物本身有關,有些則與其生長之週邊環境有關。這些作業將包括整地、播種、管理、收穫、搬運、加工、儲藏等。有些作業僅需應用一次,有些則需要多次處理,且處理之方式亦因作物對象之習性而有不同。在這些項目當中,即使相同的作物,也會因為耕作制度上之差異,而有不同之作業方式。以水稻為例,採用種子直播及採用秧苗移植就有不同的作業過程,其衍生的作業項目亦不會相同。如何選擇,則需由風俗習慣、生產成本,勞力的利用及農產品之品質與產量上來衡量。
每一項作業均有其目的與作法,整地作業亦然。一般言,整地是人類與自然爭地的開始,藉由這項作業可提供作物一個舒適的生長環境。整地需要克服諸多問題:
- 1. 不平坦的土地需整理使其平整;
- 2. 有雜草生長之地區應先剷除雜草,或防止其繼續蔓生;
- 3. 必須涵養水分的地區應能適時給水,故需預備良好的水道供水。所以整地應包括犁耕、翻土、碎土及整平等工作。
5.3犁耕之目的
犁耕的主要目的在翻鬆土壤,使土質更適合種子發芽。除此以外,依環境之差異,仍存在有其他需要犁耕作業的原因:
- 1. 土壤經翻轉,可埋覆雜草,以控制其滋長,並維持地力。
- 2. 增加土壤的透水性,減少雨水或灌溉水的流失。
- 3. 深層部位的土壤經翻鬆後,可使作物根部較易穿透,增加作物可利用之水量。
- 4. 提供發芽或發根所需要之溫度。
目前市場上已經有很多不同型式及大小的農具供選擇,以完成各種農事作業。以機械作業,其工作比人力輕鬆、快速與成本低廉。目前大部份之農機具均已經過長時間的研究與改良,以適合不同的人、土壤及作物條件。曳引機用犁通常可分為四種﹕板犁、圓盤犁、鑿犁及迴轉耕耘機。
4.4初次犁耕農具
4.4.1板 犁
板犁之功能在於切斷、提昇及翻鬆轉土壤,以埋沒廢棄物及雜草,並留下乾淨的土壤表層。其切斷部又稱為犁體,由犁頭、犁板及犁側板組成。犁頭有地面引導及犁頭傾斜部分。側向板能承受土壤作用於犁鐵的側壓力,具有穩定犁體的作用。在某些曳引機的板犁上,其犁側板由一與前進方向成一角度的犁溝輪所取代。而犁體前方通常裝有長刀或圓盤式裂土器,以垂直方向來切割土壤,使犁翻之壢條與未犁耕地分開,且容易翻轉。
犁體的切割寬度為兩個鄰近犁體側板間的垂直距離,使用直板犁時必須調整連桿組,使其距離與切割寬度相當,以便控制犁體。在以畜力為動力源的簡單犁耕作業中,以此項工作常藉著眼睛觀察來達成。
小型板犁有時附有一簡單的切土器,常應用於鬆軟土壤。而大型、重負荷的曳引機用犁,則裝有連桿點及諸如剪力銷、負載簧梁、或液壓貯蓄器等之防衝擊的設備。

圖4.1 板犁之外觀,包括犁鏟、犁鐴、犁刀輪及犁轅等
4.4.2犁耕的幾何分析
一般耕耘是將田間之土壤表層15-25cm之深度進行翻轉、碎土等作業。由於土壤之性質不同,如旱田之表土相當堅固,作物根部很難深入,故每數年必須用心土犁破壞心土層一次。表土耕具有翻土、細碎及攪拌的作用,使其更適合作物生長。
 圖4.2 犁翻土之土塊翻轉關係
圖4.2 犁翻土之土塊翻轉關係翻土之動作又稱為反轉耕,經過犁板之翻轉,可以連續不斷地將原斷面為長方形之土條進行翻轉。圖4.2為使用犁進行反轉耕的情形。從圖5.2觀察,犁在Y方向前進,切出土方斷面寬度ABCD,再沿犁板之曲面扭轉,反轉成為A’B’C’D’,與前一土方相鄰。此時土方的重心G垂線若在C’上,此為此小土方維持穩定之臨界點,若在C’左方,土方會回到原來位置,無法達成翻轉的效果。設∠A’GD’=α,土方寬度為b,耕深為h;則下列關係成立:
sinα=[A'D']/[A'C']=b/sqrt(b²+b²)=h/b 4.1
為解上式,可設h/b=a,則4.1式可改寫為:
a=b/sqrt(b²+b²a²) a=1/sqrt(1+a²)
為解上式,可用MATLAB撰寫程式,程式如下:
%find the ratio of h/b
a=1;aa=0.5;
while abs(aa-a)>0.0001
a=aa;
aa=1/sqrt(1+a*a);
end
b2h=1/aa
執行之後可得b2h=1.272,或b=1.272h。換言之,若土方之寬度b不達耕深h之1.28倍時,就無法達到翻轉的效果。在此臨界點上,原為b之耕寬長度變為V形表面,即為A’B’A”,其實際長度為 h + cosα,設增加率為M為兩線段長度之比,則M為:
M=[h+bcosα]/b
=h/b+cosα =sinα+cosα 4.2
為使M值達到最大,可以對微分,並令其等於零,即:
dM/dα=cosα-sinα=0
可得到其條件為cosα=sinα,或α=45度。因此可得到b=1.41h之最佳狀態,這也是一般板犁設計的重要數據。
4.4.3犁之結構
圖4.3為典型板犁之外觀。這是以利用犁鏟與犁刀輪將土方自地面切出,然後利用犁土板進行翻轉的工具。就構造而言,板犁具有下列部份:犁體、犁刀、前犁、導輪及犁轅等,其應用依實際需求而定。圖4.3所示為單犁底犁耕寬度10”,犁轅間隙為14”,切土輪直徑為9”可調節耕深。
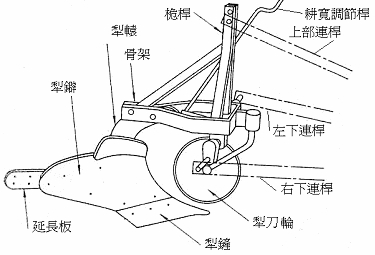 圖4.3 犁體之構造
圖4.3 犁體之構造犁體(Plow body)為犁之主體,由犁鏟、犁鐴及地側板組合而成。犁鏟多呈梯形,其鏟尖可穿入土中,再用側邊之鏟刃將土方水平切割。當土方被抬起時會產生撕裂使土方在垂直方向與鄰土分離,有些則配合犁刀或犁刀輪進行垂直切割,使土方外觀更為平整。
犁鐴(Moldboard)則是緊鄰於犁鏟之後,專司翻土之功能,依土壤性質及用途之不同,外觀具有不同曲面及形狀。就其曲面而言,可以分為圓筒型、扭轉型及泛用型。
圓筒型為切取圓筒之一部份構成,每一部之曲率均相同。圓筒中心軸與前進方向之傾向角約為50-60度。犁鏟與犁鐴對地則形成約30度陡角,造成土方易破碎,較適砂質土使用,由於犁鐴長度短,或稱為再墾犁。
扭轉型則自犁鐴連接處起其曲率越往後面時越大,形成螺旋面。這種型式對土方具反轉作用,初時反轉較慢,後期強制翻轉。如此土方較完整,不易碎裂,因而可形成連續土條,並完全翻轉。配合此曲面,其犁鐴之長度較長,甚至另加延長板,或稱為新墾犁。
泛用型曲面則介於圓筒型與扭轉型之間,適合於水分高之土壤,此犁又稱為泛用犁。若需使用於黏重土壤者,為減少其與土方間之磨阻力,有製成板條型者,稱為條型犁。
地側板(Landslide)位於犁體底旁側之一塊細長鋼板,鍜接於鏟尖,以螺栓鎖定於犁鐴及犁柱上,兼有犁床之功能。地側板為保持行進方向正直之導引,兼支撐犁體所受土壤之側壓力。側板高度高者(15-20cm)用於深耕,低者(<10cm)則用於淺耕。地側板之末端則稱為犁踵(Plow heel)。為防止腐蝕,犁踵常以鋼板保護。
其次有關犁體之最重要者為犁體對土壤間之吸引問題。圖5.4所示為將犁放在平面上時,在其地側板下面與側面及犁尖處均與平面留些間隙,以期犁體作業時,犁尖能受壓力作用而維持板犁之適當耕深及耕寬之微調。此統稱為犁吸引值(Plow suction),分述如下:
- 1. 垂直吸引或下部吸引(Vertical suction):在地側板下面,有助於將犁火吸引入土,並防止犁體之上下飄移變動,其值約為4-13mm。
- 2. 水平吸引或側邊吸引(Horizontal suction ):在地側板側面,間隙約4-12mm,可以穩定犁的前進方面,並保持一定耕寬。
- 3. 犁鏟吸引(Share suction):在犁鏟刀緣下面約5mm的間隙,使切割土方容易使力。
 圖4.4 犁之吸引與角度
圖4.4 犁之吸引與角度犁刀(Coulter)為一垂向切土之刀,在土方被抬起前先以此刀切離,使土條保持方正,犁溝平整。犁刀有時以切盤取代,或稱為犁刀輪,可以利用其轉動過程將土方切斷,極適合於草根較多之土地。一般之熟田並不一定需要加裝犁刀或犁刀輪,但阻力較大之新墾地、草原地或重黏地等之犁耕,則需要此類裝置,有時圓盤之刀緣亦作成鋸齒狀,以利切割。通常安裝於犁轅前方約13-20cm,可以調節其位置。犁刀及犁刀輪之阻力以總牽引力之1/8為佳。
前犁(Front plow)是在犁體之前方另加裝一具小型犁體,以作前導犁耕。雜草叢生之土地進行犁耕時,可先利用此種前犁將地表面予以淺耕,使耕起之雜草翻覆於已犁過之犁溝中,然後再用經主犁所翻起之土方加以埋沒,以防其再生。此種犁又稱副犁或補助犁,其犁尖應在犁尖之上方,往前約10-16cm之距離,其耕深為38-56cm。對整個犁體而言,稱為二段耕犁。
5.4.4犁的特性
(1) 楔形理論
犁鏟或犁體曲面上與前進方向間之關係可如圖4.5所示。令y軸為犁體之前進方向,並以此構成立體之三個軸向,並取一四面體oabc。由其abc之面與xyz三個軸構成之角度分別為α(與y軸)、β(與x軸)、γ(x-y面)。由此三個角度犁鏟對土方之切割具有楔的作用(Wedge action),依序分別為耕起角α、翻土角β及切斷角γ。三個角度同時作用即可將土方耕起、切斷及翻轉,成為犁具之特性(圖5.6)。表5.1所示為不同土壤與犁曲面特性間之關係:
 圖4.5犁尖之楔形理論
圖4.5犁尖之楔形理論 圖4.6 不同曲面形成之犁面
圖4.6 不同曲面形成之犁面表4.1 不同土壤與犁曲面特性間之關係
土壤性質 耕起角α 翻土角β 切斷角γ 犁體曲面 翻土板寬比 碎土 用途
13-25 35-55 30-50
-------------------------------------------------------------------------
砂質土 大 大 大 圓筒型 0.7-0.8 大 再墾用
壤土 中 中 中 泛用型 0.8-1.0 中 泛用
重黏土 小 小 小 扭轉型 1.0-1.3 小 新墾用
-------------------------------------------------------------------------
(2)犁的阻力
圖4.7犁板作業時,所受之土壤阻力R可分為三個相互垂直的分向力,即犁耕水平方向Z,側分力S,垂向分力V。Z相當於水平阻力,亦即牽引力需要抗衡的阻力。設水平阻力為ZL,犁底側面及底面與土壤之摩擦力SW、VW,其關係為:
ZL=A+SW+VW
 圖4.7 犁面所受之力
圖4.7 犁面所受之力設地面板與土壤間之摩擦係數為μ,則:
SW=μS=μZtanθs
Vv=μV=μZtanθv
在總牽引力中切削土方約佔45%;翻土佔34% ;而使犁前進所需之力佔21%。在利用曳引機或尾輪支持犁重或垂直阻力時,後項之垂向力成極小值。但整個水平阻力,ZL變為:
ZL=Z[1+μ(Ztanθs+tanθv]
比阻力(Specific resistance)為每單位截面積之水平阻力,其值與耕耘速度V之開方成正比。設耕耘速度為一單位(1m/s)時之比阻力為z0,則寬度為b高度(耕深)為h之土方所遭到之阻力ZL應為:
ZL=V1/2.z0.b.h[1+μ(Z.tanθs+tanθv] [W]
其所需之耕耘動力D[W]為阻力與速度之乘積,即:
D=ZLV=V3/2z0bh[1+μ(Ztanθs+tanθv] [W]
表4.2為不同土壤之比阻力與摩擦係數
土壤種類 比阻力 摩擦係數
kgf/cm²(N/cm²) μ
------------------------------------------
砂土 0.20-0.32(2.0-3.2) 0.364
砂質壤土 0.23-0.35(2.3-3.5) 0.425
壤土 0.25-0.40(2.5-4.0) 0.466
黏質壤土 0.30-0.50(3.0-5.0) 0.520
重黏土 0.35-0.60(3.5-6.0) 0.577
------------------------------------------
4.4.5碟犁 (圓盤犁)
碟犁主要構造為一能迴轉的碟型圓盤,其盤面與前進方向及地面成一角度,此角度可依土壤狀況調整。碟犁適於雜物或障礙物多的乾硬土上使用,但其價格高且維護不易,是為缺點。多碟犁有更多及更小的圓盤,適於裝在較大型曳引機後面以高速從事耕寬大、耕深淺的工作。由於土壤作用於較大邊的推力較大,必須由一具有角度的鋼輪來支撐;其形狀通常以另一圓盤或具有凸緣之圓盤裝於右犁具後面。
 圖4.8 碟犁之方向及作用角
圖4.8 碟犁之方向及作用角碟犁(Disk plow)為板犁之變形,但形狀更為簡單。其外形如衛星碟盤。碟盤之直徑約60-81cm,曲率半徑46-64cm,凹面深度則為9-13cm。碟盤中心傾斜於前進方向,或稱為圓盤角θ,其範圍42-45度,在垂直方向之傾斜角α約15-25度。
當碟犁其受到牽引時,可藉土壤之反作用力使圓盤旋轉,在此過程中可迫使圓盤邊刃切斷土方,被切之土方將沿圓盤之轉動被抬升而翻動,產生翻土及碎土作業。在圓盤之上方另有一刮刀,可以將黏著於圓盤之土方刮除。因為圓盤可以自由旋轉,故即使在多石之地進行犁耕,亦不致損傷犁體。
碟犁常由1-7個圓盤組成,每碟之耕寬約為18-30cm,其耕深則以圓盤直徑之三分之一為限,或為10-30cm。但據研究,最適之耕深為圓盤直徑1/4,此時其阻力最小。由於碟犁無犁底及側板,因此並無吸引現象。為保持耕深其骨架必須加重。由於側壓力約為牽引力之50-70%,故必須另外加裝後輪及盤輪作為支撐。且由於側壓力大,支撐部份必需採用側推或斜滾筒式軸承。
圓盤所受土壤阻力可用三個互相垂直的力Rx、Ry與Rz表示。圓盤之傾斜角與圓盤角對入土性能及土壤阻力有較大的影響。一般言之,圓盤角以近45度時阻力最小,此角度愈大雖然抛土較遠,垂直阻力減少,入土性能增強,但總阻力增加。傾斜角一般在15-25度之範圍。傾斜角增大會使牽引阻力和垂直阻力會增加,但側向阻力反而減少;傾斜角較小時,入土性能較佳。
碟犁適用於堅硬乾燥土、黏土、礫土、殘株或根莖特多的耕地。在板犁作業有困難的地區亦可以碟犁取代。碟犁之缺點是其翻土性能不佳,產生之坵塊大,但對防止土壤沖刷問題倒是比較有利。
4.4.6犁耕方法
一般犁耕方法計有下列數種:
- 1. 來回耕法:分外翻法(Casting)及內聚法(Gathering)。
- 2. 迴轉續耕法:分外耕法與內耕法兩種。
由於犁具有方向性,故來回耕法需配合特定方式。來回耕法必須保留頭地(Head land),故耕寬不能太大。使用曳引機耕犁時,一次耕地之寬度須為曳引機連結耕犁總長之2-3倍長。來回耕之內聚法會在中央形成一個背脊(Back furrow);而用外翻法則會在中心形成犁溝(Dead furrow)。若每年均採用同樣的耕法會使背脊加高或使犁溝加深,故應每年輪流不同耕法。
迴轉耕法是沿著區塊之邊界環繞進行耕作,故即使迴轉耕法中之內耕法,也會在中央形成背脊,而用外耕法也會形成犁溝,故仍有必要每年輪流採用。迴轉耕法不會有整塊未耕地,但在四角落仍會殘留未耕地,必須設去應用其他方法加以補救。
曳引機拖拉犁時必須調整拖桿,使犁具之耕深符合需要,並保持直線前進方向。若前耕深輪陷入太深,使犁具偏向已犁過的土地方向時,須將犁具端的拖桿往下移,使曳引機端側向沒有犁耕過土地。
掛有犁具的橫向安裝桿,其曲柄朝向已犁耕側,可以用螺旋調節器來調整角度;經此可改變前犁溝的寬度。若其對曳引機轉向影響太大,軸可稍微向旁邊移動來減少這個效應。雙向犁的前犁溝通常由橫安裝桿右端的制動制器來調整,前制動器控制一個方向,後制動器控制另一個方向;這些必須加以調整,直到犁溝能在兩個方向相互配合為止。曳引機安裝合適的車輪以配合犁的尺寸是很重要的;否則上述的調整就沒有什麼作用,易使工作效果不佳。
 圖4.9 來回耕(順序耕)法、外耕法及內耕法(由左至右)
圖4.9 來回耕(順序耕)法、外耕法及內耕法(由左至右)4.4.7 深耕犁
 圖4.10 心土犁或鑿犁之碎土作業
圖4.10 心土犁或鑿犁之碎土作業鑿犁(圖4.10及4.11)主要功用在破裂硬土,並將雜物留在表面上,因此頗適用於有土壤沖蝕嚴重的地區。其齒桿可作橫向調整,以適合不同行列作物的要求。犁尖部位有些設計成更換型,磨耗後或破壞時可以更換,其根部則有剪力螺栓保護,以避免撞到異物。在溫帶地區,傳統上均使用板犁為犁耕工具。此種犁具對雜草之控制,效果良好;另一種為圓型之碟犁,只要調整適當,亦有相同的效果。但這兩種犁對深層土壤並未具鬆土效果,有時反因曳引機在畦溝內反覆操作,壓實土壤,使作物根部之穿透阻力增加。
鑿犁或釘齒耙之鬆土功能則甚佳,且曳引機亦無過份鎮壓之虞,然因無翻土作用,故雜草必須使用其他方式控制。在乾旱地區,翻轉土壤對雜草的控制並不全然有利,反而因蒸發作用會使土壤表面水分迅速流失,因此常須採用火燒的方式消除雜草。在土質堅硬地區,耙齒兩側旁45度範圍之三角區內會受到擾動,故利用間隔較密之鑿耙作業可使土層全面弄鬆。例如,間隔30公分之釘耙在深度15公分之乾硬土壤中作業時,其碎土程度足可立即作畦整地,不必二次犁耕。
鑿犁在不易碎裂之濕黏土壤上作業時,容易產生挖槽現象,效果較差。不過,在許多情況下,若能附加”雙翼板”,其性能將可改善。根據試驗,鐵質含量較多的土壤中,若採用條帶間距70公分的鑿齒耙,將可獲得適合根部成長之土壤鬆度,且其作業能量約僅為板犁之半。在雜草控制力面,採用寬平式碟犁,其所需能量則約僅為鑿犁之半。土壤狀況良好時,可採用淺耕作業,其優點是工作速率較傳統式高,可降低作物成長季節之時效損失。這項效能在一年兩作的地區尤為重要,無論是大規模作業或小農制之作業上,均不可忽視。
 圖4.11 心土犁
圖4.11 心土犁4.4.8迴轉耕耘機
迴轉耕耘機是以曳引機為動力旋轉耕耘刃,以切削與細碎土塊。其切土、碎土能力強,且一次作業能達到犁耕數次的效果。犁後地表平整、鬆軟,故頗能滿足農民精耕細作、節省耕作次數之要求。在國內,迴轉耕耘機已取代各種板犁的作業。然迴轉耕耘機耗費相當大的動力,且一再使用之後,容易使土壤結構遭受破壞。
 圖4.12 迴轉耕耘機之組成
圖4.12 迴轉耕耘機之組成迴轉犁依旋轉耕耘軸的位置可分為橫軸式(臥式)、立軸式(立式)及斜軸式等三種。按與動力連結方式分為牽引式、懸掛式及直結式等三種。依耕耘軸傳動方式則可分為中間傳動與側邊傳動等兩種。
圖4.12所示為由曳引機動力導出軸驅動,並由曳引機決定前進速度。刀刃在切土過程中,先將土方切下,再由後方拋出。土方會撞擊拖板及罩殼,因而發生細碎作用,並掉落在地面上。此動作因為刀刃之迴轉,表土會連續不斷受到打碎,並平鋪在後面的地表上。
 圖4.13 迴轉耕耘刀之作用情形
圖4.13 迴轉耕耘刀之作用情形4.4.8.1 一般構造
迴轉耕耘機主要由機架、傳動系統、旋轉耕耘軸、刀刃、耕深調節裝置、罩殼組成(圖5.13)。機架多屬臥式,呈矩形。由前梁(左右主梁)、左、右支臂及作為耕耘軸的後梁所組成。前梁為鑄造圓管,中間有齒輪箱,兩側均為支臂,另一側則有傳動箱。
耕耘軸與刀刃則是迴轉耕耘機之主要元件。耕耘軸由無縫綱管製成,軸兩端與兩支臂銷結,其上焊有刀座,刀刃依螺旋狀排列以供安裝刀刃。
迴轉耕耘機之傳動源由曳引機動力導出軸,以萬向接頭傳至其中間齒輪箱。再由此驅動耕耘軸。耕耘軸之轉速一般為198-275rpm。
耕深控制有兩種方式:分為雪撬式及耕深輪式。前者安裝於機架底部,調節雪撬與耕耘軸之相對距離可改變耕深,一般用於水田。耕深輪則安裝於機體後部,由套管、升降桿及輪叉等組成,普用於旱田作業。
4.4.8.2 刀刃的軌跡
刀刃切削土壤時,刀刃之絕對運動為機組前進運動與耕耘軸的回轉運動之合成,其條件是過程中不能產生推土的現象。此時之刀刃運動軌跡成擺線。
 圖4.14 耕耘刀作用之軌跡
圖4.14 耕耘刀作用之軌跡圖4.14所示為以原點O為耕耘刀之迴轉點,x為車體前進方向,y為垂直方向,以向上為正值,表示耕深。設刀刃之迴轉速度為ω,與曳引機驅動輪之方向相同,其初始位置為mo,當刀刃轉過α1=ωt1角度時,端點先至m1’點,而機組同時往前往動OA1=vmt1距離,實際之端點應為m1。其座標點可以表示如下:
x=Rcosωt+Vmt
y=-Rsinωt 4.3
式中,(x,y)為刀刃之端點座標,vm為機體之前進速度,m/s;R為刀刃點M之迴轉半徑,mm。
上兩式對時間微分可以得到M點之速度如下:
Vx=dx/dt=Vm-Rsinωt
Vy=dy/dt=-Rcosωt 4.4
點M之絕對速度及夾角餘弦為:
V=sqrt(Vx²+Vy²)=sqrt(R²ω²+Vm²-2RωVmsinωt)
φ=cos-1[Vx/Vy]
=[(Vm-Rωsinωt)/sqrt(R²ω²+Vm²-2RωVmsinωt)] 4.5
由於刀刃切土時,車體前進的速度不能使刀刃產生頂土之現象,為此水平速度必須符合下面之條件:
Vx=Vm-Rωsinωt≦0 4.6
在切土過程中,刀刃向後之分速度會逐漸變大,故只要刀刃在開始切土時能滿足上式條件即可順利進行。一般迴轉耕耘機之前進速度vm約為0.5-1.5m/s,而刀刃端點之切線速度約為3-8m/s。
4.4.8.3 刀刃工作深度
迴轉耕耘機之耕深與運動參數R、Rω及vm有關,其關係如下:
y=-(R-h) 4.7
代入上式,得:
sinωt=[R-h]/R
Vm≦Rsinωt=Rω[R-h]/R=ω(R-h) 4.8
上式應為切土之合理條件,設切線速度U=Rω,代入上式,則:
Vm<ωR-ωh
h<R-Vm/ω = R(1-Vm/U) 4.9
由上式可看出,當vm/U之值減小時,耕深可以增大,最高為迴轉半徑R。但隨著h值之增加,其消耗之動力會增大。因此,應有一合理值,一般的設計中,旱作約為12-16cm,水田則約為14-18cm。
4.4.8.4 耕耘刀進給量
刀刃沿前進方向在縱斷面所切削之土方厚度稱為進給量。設其為Sz,可表示如下:
SZ=Vmt=Vm x 60/zn = Vm x 2π/[zω]=Vm/U x 2R/z [cm] 4.10
其中n為耕耘軸迴轉速[rpm],z為同一斷面之耕耘刀數(國內z=1,歐美z>1),t則為每一耕耘刀所經歷之時間[sec]。
由上式可知,增加z或n(ω)等均會令進給量Sz變小,土方變為細碎,而隨轉速增加,功率消耗亦會增加。若增加刀刃數,則刀刃間距變小,易產生堵塞現象。若進給量增大,土方及溝底凸起高度亦增大,所以進給量不能過大,一般約為1-2cm。
4.4.8.5 溝底凸起高度
迴轉耕耘機耕作後,耕作層的底部有凸起存在。凸起高度yc值的大小是由刀刃運動軌跡曲線和刀刃進給量Sz決定的。如圖4.15所示點C為溝底之最高點,其座標為:
 圖4.15 切削後之殘畦及高度
圖4.15 切削後之殘畦及高度xc=R([Vm/U]φ'-sinφ')
yc=-R(1-cosφ') 4.11
當φ’值不大時,其弧度值與正弦值約略相同,即sinφ’=φ’:
xc=R([Vm/U-1]φ'=SZ/2
∴φ'=SZ/[2R(1-Vm/U)] 4.12
因此高度yc為:
yc=-R[1-cos{SZ/[2R(1-Vm/U)]}] 4.13
4.4.8.6 刀刃之後角
刀刃在切土過程中,刀刃之軌跡曲線與刀背的夾角ε稱為刀刃後角(圖5.16)。圖中CH為平行於迴轉耕耘機前進方向的斷面與刀刃相切的線。後角的作用是使刀片能在切土時有較好的入土角度,以避免刀背推擠未切的土壤。為此必須使CH之軌跡在刀刃H點之軌跡以內;刀刃初入土時ε值應在很小的角度下入土,以減少阻力。因此刀刃在受到土壤阻力最大的位置時,調整後角的度數可以減少功率消耗。刀齒在完成切土後,後角變為較大以利向後拋土。後角的大小是由刀背的結構參數與刀刃運動軌跡決定。
 圖4.16刀刃之後角
圖4.16刀刃之後角在設計迴轉耕耘機時,刀刃的工作參數會相互影響的。在一般情況下,可先確定SZ、h等數值,再根據曳引機的功率初步確定耕耘軸的轉速範圍,然後再計算確定刀齒的數目和機器的前進速度。
4.4.8.7 耕耘刀之種類 (圖4.17)
- (1)普通型:其正面切削刃口較寬。正面刃口與側面刃口均有切削作用。工作時靠近刀柄部分的刃口先與土壤接觸,後後依次遠離耕耘軸中心沿側面刃口滑移。當達刀刃側面與正面刃口彎折處時,未被側面刃口切斷的雜草轉移到正面刃口,壓向未耕地進行切削;並在回轉過程中向外運動,因此易於切斷或滑脫。這種刀刃對土壤的適應性強,故普遍在亞洲地區使用。
- (2)L型:為直角型刀刃,其正面及側面都有刃口,呈直線型,彎曲部分近於直角。工作時,正面刃口先與土壤接觸,然後依次到刀刃根部。由於莖桿雜草等可沿側刃滑移到接近回轉中心,因而易生纏草堵塞現象。但這種刀刃碎土能力較強,所需動力較大,適於旱田碎土用。
- (3)C型:或稱鑿形刀,其刀刃之正面為較窄的鑿形刃口,產生刺切作用。相鄰兩刀刃間距大於正面刃口之寬度,所有土方兩側主要以撕裂方式與土地分離開來。其入土性能較好,所需動力小,主要用於板結土壤的水田耕作。在潮濕粘重土壤中耕作時漏耕嚴重,易纏草堵塞。
 圖4.17 刀刃類型 (a)普遍型 (b)L型 (c)C型
圖4.17 刀刃類型 (a)普遍型 (b)L型 (c)C型4.4.8.8 刀刃口曲線之形狀
普通形刀刃口曲線(圖中之ED部份)與正面刃口曲線(Dn段)組成(圖4.18)。側面刃口曲線應滿足不纏草和耕耘阻力小的要求。設刃口曲線上任意點m處碰到莖桿時,設通過m點之運動軌跡線為aa,其切線為BB’,與刃口曲線之切線AA’相交,其交角為τ。若作用於莖桿之力N沿法線,則可得其分別在兩切線方向之分力為T與P。若T大於刀口對莖桿之磨擦力F時,將會沿刃口邊緣滑動,因而產生切斷及脫離的作用。故滑切條作為T>F:
 圖4.18 普通刃(彎刀型)與滑切作用
圖4.18 普通刃(彎刀型)與滑切作用T=Ncotτ F=Ntanφ 4.14
∴cotτ>tanφ tan(90∘-τ)>tanφ
∴90∘-τ>φ ∴τ<90∘-φ 4.15
式中,φ為莖桿對刀刃之摩擦角。
一般彎刀型之刃口均採用阿基米德螺線,其方程式為:
R=R0(1+Kθ) 4.16
式中,R0為螺線之起始半徑,R為對應θ之半徑,K為常數。設i為AA’與om聯線的夾角,則依圖4.19之螺線關係,可說明如下:
 圖4.19 側刃曲線夾角與螺線角度間之關係
圖4.19 側刃曲線夾角與螺線角度間之關係設:
θ2=θ0+θ θ1=i+θ2 ∴i=θ1-θ2
tani=tan(θ1-θ2)=[tanθ1-tanθ2]/[1+tanθ1tanθ2] 4.17
由於 tanθ1=dy/dx ,將螺線改為直角座標表示,則:
x=R(θ)sinθ2
y=R(θ)cosθ2 4.18
tanθ1=dy/dx=[dy/dθ]/[dx/dθ]
=[R'sinθ2+Rcosθ2]/[R'cosθ2-Rsinθ2]
=[R'tanθ2+R]/[R'-Rtanθ2]
∴tani=[tanθ1-tanθ2} / [1+tanθ2tanθ1]=R/R' 4.19
將上式整理,角度i變為:
i = tan-1{[1+Kθ]/K} 4.20
顯然i角隨θ增加而變大;而τ則隨之減少,但此時之滑切作用反而增大。刀刃口曲線應使溝底橫向平整,以減少衝擊及動力消耗,同時對草桿具有切割之作用。為此,刃口曲線工作位置在縱垂面的投影應在刀刃最大半徑的圓周上。在水平面的投影為與側面刃口相交的斜線。側面刃口與正面刃口的交角γ大於90度。
4.4.8.9 刀刃的最大切削半徑,Rmax
刀刃之最大切削半徑與耕耕及傳動箱結構尺寸有關。若耕深增大,其切削半徑須增大,其切削扭矩亦隨之增加。因此,在滿足耕深要求和傳動箱結構尺寸允許下,應採用較小者。一般之最大切削半徑在240-250cm之間。
4.4.8.10 曲線之起始半徑R0
螺曲線所需之起始半徑R0可參考圖4.20。其值可由下式表示:
R0=sqrt(Rmax²+SZ²-2SZsqre(2Rmax.hmax-hmax)) 4.21
式中,hmax為最大設計耕深[cm]。
 圖4.20 R0之確定
圖4.20 R0之確定4.4.8.11 正面刀刃幅寬
正面刀刃幅寬b之大小影響迴轉耕耘機之工作質量和功率消耗。若幅寬b增大,刀刃片數減少,間距因而加大,功率降低,但碎土品質較差。一般刀刃幅寬有46、50及55cm等三種。
4.4.8.12 最大中心包角
依據刀刃曲線及螺線之公式,可以求得θmax。其大小與側刃的滑切作用有關,並受刀刃長度之限制,一般之θmax值在26-45度之間。
4.4.8.13 耕耘刀的配置
為使耕耘刀作業時,避免發生漏耕及堵塞的問題,刀刃在耕耘軸上之排列需符合下列之需求(圖4.21):
- (1) 同一回轉平面內,若配置兩把以上耕耘刀時,應維持相等的進給量,以達均勻碎土的效果,並維持溝底平整。
- (2) 在耕耘軸迴轉一週的過程中,耕耘軸每迴轉一個相等角度時,在同一相位角須是一把刀入土,以維持工作穩定性和耕耘軸負荷平均。
- (3) 相繼入土的刀片在耕耘軸上的軸向距離越大越好,以免發生堵塞。
- (4) 左彎和右彎刀刃應盡量交錯入土,使耕耘軸兩端軸承受之側壓力較為平衡。
 圖4.21 耕耘爪之排列
圖4.21 耕耘爪之排列一般之耕耘爪之安排如圖5.21及5.22,但實際則採用螺旋形分佈,以符合上述之需求。
4.4.8.14 迴轉耕耘機之動力
耕耘機消耗的功率包括下列項目:
- 1. 刀爪切削土塊時消耗:此值不變化很大,開始打擊時功率消耗最大,至溝底時變到最小。平均約佔全部之42% 。
 圖4.22 中央驅動式之耕耘爪配置
圖4.22 中央驅動式之耕耘爪配置- 2. 刀刃拋土時所耗功率:約佔40.5% 。
- 3. 耕耘作業時推動機組之功率:約佔6.8%。
- 4. 耕耘作業時各傳動部分之消耗:約佔10.7%。
P=2nπT/60 4.22
式中,T為耕耘軸扭矩[Nm],軸轉速n [rpm]。
就土壤阻力方面,增大耕深會增大扭矩,因此耕耘動力也會增大。單位耕耘斷面積之軸扭矩稱為比扭矩,其值依耕探而不同(圖4.23),在10cm處其值最小。但實際應用之耕深約為15cm。比扭矩可表示如下:
 圖4.23 比扭矩與耕深間之關係
圖4.23 比扭矩與耕深間之關係ρ=T/[bh] 4.23
不同土壤之比扭矩如表4.3,由此可以得到所需之扭矩,並進而得到耕耘動力P。式中之b、h分別耕寬及耕深,各以[cm]表示。
表4.3 迴轉耕耘之比扭矩
土壤種類 比扭矩ρ[N.m/cm²]
---------------------------------
砂壤土 0.06-0.15
壤土 0.15-0.30
植壤土 0.30-0.40
---------------------------------
迴轉耕耘機多用在濕稻田的耕作,由兩個附有螺旋刀片的轉子所組成。迴轉耕耘機以碎土為主,不具翻轉功能。但作業迅速,通常不需二次耕。但所消耗的馬力特大。台灣地區由於一年兩至三作,整地的時間甚短,故代耕中心購置曳引機常以高馬力為主,是有原因的。
4.5二次犁耕機具
4.5.1細部整地與作畦
土壤經過初步犁耕後,仍需進行第二次整理,或稱整地,使土塊變細,適於播種。整地作業有碎土、整平、鎮壓作業,有些地區尚包括起壟與作畦。碎土之目的在犁起大土塊後另施壓予破壞、粉碎。破壞土方的方法包括切斷、壓碎、楔形破壞及衝擊破壞等。楔形破壞之阻力最小,但不容易壓到土塊,採用衝擊式則對乾燥之植土較為有用。
這種細部作業有時必須反覆多次,其所使用的農具包括彈簧齒耙、中耕器或滾壓輪。但對同一田區而言,使用輪式或笨重機具重覆作業對土壤並不一定有益,新近的耕法是儘量減少曳引機車輪在田間的重覆鎮壓。較好的方法是採用組合式農具,加掛於曳引機後面,可將原需多次作業的工作一次完成。或者採用微整地(甚至零整地)耕法亦可達成上述目的。
所謂微整地是僅就作物實際生存所需之土壤部位進行鬆土(局部整地);而零整地則是不經破土、碎土等作業,直接播種。另一種更前進之作法是,在田區中間預留固定之”車輪小徑 ”,使所有作業機械之車輪固定沿此路徑行走。根據試驗,車輪小徑所減收之產量尚能由其他未受鎮壓所導致的增產量取得平衝。
水稻田之濕田作業中,若以役畜犁耕,其腳蹄產生之攪拌作用對稻株成長有適當的幫助。但若使用重型機具,則由於牽引問題及機具重量過重可能破壞具有蓄水功能的硬盤,反而不適當。
具有畦壟或畦床之田區,在收穫之後,其後續作業常需包括這些畦床之重建。畦床之應用,最大目的在保持水分及排水。有些床面中心寬l.5米,斷面呈飛盤狀,具有排水之功能。畦床上可種植兩行作物,行間稍微低陷以期保蓄水分。畦之兩側有深溝,可將多餘水分排除,以避免作物遭到水浸泡。在此種情況下,中耕整地作業之目的主要在維護畦床原來形狀,或者在作物生長區域用釘耙稍微進行鬆土,故其所用之農具亦自不同。畦床之結構與位置可不必隨種植季節而改變;進行中期作業時,可用一對役畜或中耕機之雙輪分別行走於兩側之土溝中,拖曳農具拉桿,而其所需之農具則直接加掛在此拉桿上。
畦壟則屬A型畦床,其復建工作可用作畦器或手工具將溝底之土壤鏟至畦頂。就農藝的觀點而言,較適當的方式是利用鑿犁沿著土溝將前年所造成之耕盤先設法打破,然後再將土壟部分之土壤均分推向原畦溝中,如此可產生相當疏鬆之新畦,惟此法需耗較高的馬力。作畦器在作業時,若兩邊破土之程度不均,則方向較難控制。此項作業仍然應屬於初級整地作業的範疇。
4.5.2圓盤耙
圓盤耙由幾組裝在軸上的圓盤所組成,其與前進的方向成某一角度;作業時安裝兩組或四組的圓盤可消除作用於曳引機的淨側向推力(圖5.24)。碟耙與前進方向所成的角度越大時,所能攪動土壤的程度也越大,有時為適用於多草地時,碟片之邊緣常作成缺口的形狀,以增加其切割能力。通常用來粉碎初次犁耕後的土塊,而作成苗床。較大機型用液壓來控制夾角,並有耕深調節輪;大部分的型式都附有重盤,可用來增加重量,以獲得足夠的土壤深度。
比較大的圓盤組合係以四組圓盤構成,圓盤群有一可調節的角度,較大的角度對土壤影響較重,但需要較大的拉力。
 圖4.24 碟耙
圖4.24 碟耙4.5.3輕型耙
 圖4.25 釘耙
圖4.25 釘耙 圖4.26 鍊耙
圖4.26 鍊耙中耕器的構造像輕型的鑿犁,但具有更多的齒桿。它用來攪拌土壤、以獲得均勻的壓實性,並將良好的物質留在上層、亦可以作某些斷裂工作(圖4.25, 4.26)。起壟型及彈簧負載型兩者皆適用。齒桿通常交錯排列在架上,使殘留物有更大的空間通過農具;某些型式有特殊角化的腳架,可以用來降低殘留物集結過多的問題。
除釘耙外,輕型耙尚有許多種設計:鋸齒型、鏈條連桿型、木軸上裝釘子等等。這種在田間雜物很多的環境下,不適合使用。此外,樹梢或分枝也可以當作耙來使用(圖5.27)。
 圖4.27 彈簧耙
圖4.27 彈簧耙4.5.4整平機具
 圖4.28 推土機
圖4.28 推土機園圃場的整平有整平的專用機(圖5.28),這是獨自技撐裝置之大型整平機,以雷射自動控制水平。圖4.29為一種汽車曳引機混合之概念整平機具。
 圖4.29 新觀念之推土機
圖4.29 新觀念之推土機4.5.5鎮壓機具
鎮壓機具為鎮壓過分膨鬆土壤之用,或為碎土作業時將殘餘之土塊更予以粉碎,同是加以壓平之一種機具。滾輪式鎮壓機(圖4.30)為代表性機種,可應用於田地或建築用地。圖4.31則為一般配合在中耕器後之鎮壓輪。
鎮壓作業普通均在表土為之,使土壤中不致存有空隙,以保持適當的水分。這種鎮壓機具分表土鎮壓器與心土鎮壓器兩種,前者主要以輥子構成,通常須有載重,以調整其重量。輥子之種類則包括滑面輥子、管形輥子、切土輥子、星形輥子及凹形輥子等。輥子表面愈粗糙者,旨在增強其碎土作用。
心土鎮壓器則以狹形輪為主件,旨在利用壓力深入表土內,破碎底層土壤。實際上前面所述之星形輥子亦有具心土鎮壓之作用。
 圖4. 30鎮壓輪
圖4. 30鎮壓輪 圖4.31 配合彈簧耙之鎮壓輪
圖4.31 配合彈簧耙之鎮壓輪4.5.6其他鬆土機具
有些碎土鬆土機具則依作業目的而不同,附有爪子的動力垂直軸型式,只做成較大的尺寸,可視其為特殊的作業機械,用在某些溫帶作物的苗床準備作業上。(圖4.32)
這些機械可有水平和垂直的軸,並裝備有刃片或爪子,使其在土壤上被推動時能迴轉。這類機械有好的攪拌和混合的特性,並可防止殘留物的阻塞;其中某些型式適合用在隆起的耕作系統中,用來作雜草的控制。
作畦的器具也可以安裝在中耕機的架子上,其機體通常具有可調整的檔泥板及可更換的磨耗點。一般使用的型式有兩種,一為在軟土中的馬鈴薯型和硬土中的起壟犁型。在某些地區,起壟犁亦可用以控制土壤流失,使排水有機會滲入土中 (圖4.33 , 4.34) 。
 圖4.32 中耕器配合施肥機
圖4.32 中耕器配合施肥機 圖4.33 中耕機具組合
圖4.33 中耕機具組合 圖4.34 附掛於曳引機後之迴轉中耕器翻土情形
圖4.34 附掛於曳引機後之迴轉中耕器翻土情形4.5.7中耕管理機械
在作物發育過程中,其表土會逐漸硬化,因而根部所需之水分及空氣不易滲透。中耕的目的即在破壞作物周邊硬化之表層土壤。中耕過程中有時亦配合除草或培土的工作,以抑制雜草,促進分株、防止倒伏。
中耕之目的既在破壞表土,其所用原理如同耕耘,但一般之耕深僅7-8cm,也不需要翻轉。在此情況下,其遭遇之阻力及所需能量均較小,動力需求不是問題。但因為必須在作物中作業,為不傷及作物,須正確保持相對於作物之機械位置,提高作業精密度。
這類的機械具有水平的軸,而且附有不同型式的刀片可用來攬拌及切割土壤。機械的大小從很小至很大,且使用不同型式的刀片:拾起爪、彈簧一拾起爪、迴轉砍伐刃片、L型刃片等等(圖4.35)。這些機械很適合用在水稻田的作業,來攪拌土壤及混合廢棄物。(砍刀型刃片必須用來防止殘留物的捲入中耕機中)除了使用整平板外,這些通常為唯一需要的中耕機械。但這類的機械不適用於硬土壤的狀況(除了裝在大曳引機後的大重負荷型式外)、因其在這種情況下使用會有嚴重的振動及磨損的問題。
圖4.36為為單輪式,可進行菜園、花園、菸園、豆園、甘蔗園、茶園、果園、雜糧、作物之之鬆土、除草、開溝、培土等工作。由於一般雜糧作物培土做畦時,溝渠寬度較窄,故耕作時皆使用單鐵輪作業。而雙輪之設計乃為方便進出田園行走用及遇特殊作物之不同耕作方式時使用。此外,可另加裝TS-721A單行式播種機,進行雜糧作物之播種工作。其他型式如圖5.37所示之各種用途。
 圖4.35 雙輪式中耕管理機
圖4.35 雙輪式中耕管理機 圖4.36 大順牌TS-628/TS-628H中耕管理機
圖4.36 大順牌TS-628/TS-628H中耕管理機 圖4.37 各種中耕管理機之組合型式
圖4.37 各種中耕管理機之組合型式4.6整地作業自動化
整地是田間作業重要的一環,由第四章所述,大部份之整地作業均必須與曳引機連結,並須熟練的操作人員操作。這一個操作人員不僅為一搬車輛之駕駛而已,他必須負責觀察地面之平整、播種之確實性、作物之成長狀況、雜草之蔓延以及天候之變化等資訊,進而作適當之判斷。這些工作集中在操作員人身,常易導致其工作疲勞,甚至不容易撐握工作之精度,故如何將部份工作或資訊自動化,實為迫切之事。
傳統之自動系統係利用油壓及扭力感測器作農機具之拉力與深度控制。近年來,部份農機具除利用油壓驅動外,尚可利用其與機電整合相搭配,可以更準確地控制各項農事機具之水平與升降,以改善其作業精度。
4.6.1板犁拉力之調整
曳引機與拖拉之犁具是一體的關係,其間拉力之控制也是重要的一環。作業機具之阻力過大,會導致拉力過大,曳引機無法前進,輪胎會嚴重打滑。因此拉力過大,必須調整犁之作業深度,以減輕阻力。圖4.37所示為一套拉力自動調整系統,由輸入、控制單元及輸出等三部份構成。輸入部為彈簧拉力感測器,可以感測拉力之大小。控制單元則由微電腦或微處理機組成,可讀入輸入信號,經比較與判斷後,對輸出部發送控制指令。輸出部由電磁閥、油壓閥、油壓缸、舉升臂及三點連接裝置組成。當拉力過大時,控制單元將令輸出部作動,以舉升作業機,減少耕深。拉力正常時,會令作業機下降,使其維持一定的作業深度。
傳統之犁具拉力與定位控制係藉一油壓系統達成(如圖4.38)由彈簧直接作動油壓閥,在機電整合中則在控制單元植入判斷之功能,因此可以進行較複雜之控制程序。
 圖4.38 傳統之農具控制系統
圖4.38 傳統之農具控制系統參考資料:
1. 北京農業機械化學院。1992。農業機械學。農業出版社。
2.陳孝祖。1964。農機具。資元堂。
3.圓村光雄。1981。農業機械學。科技圖書。
4.關昌揚譯。1972。農業機械化技術。徐氏基金會。
5.馮丁樹譯。1987。小農制之農業機械化。徐氏基金會。
沒有留言:
張貼留言